 手机直线:
手机直线: 咨询热线:0571-56211150
咨询热线:0571-56211150








微小机械按其尺寸可以分为三类,即10-3m-10为微小型机械,10-6m-10-3m为微型机械,10-9m-10-6m为纳米机械。微型机械一般是指具有体积小、性能稳定、能耗低和智能化的特点,将广泛应用于微型机器人、航空航天、生物医疗科学和军事科技等领域。它的研究在国内外受到高度重视,许多国家投入了大量经费资助微型机械的开发,使其得到迅速地得到了发展。微型机械及其系统强度分析方面的研究,并不是传统机械进行直接微型化,而是基于广泛的现代科学技术,并作为整个微米/纳米科学技术的重要组成部分的一个崭新研究课题。
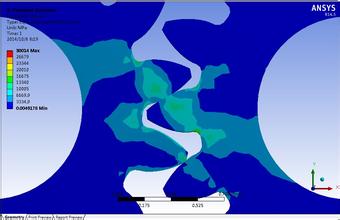
在研究的微型机械系统中,齿轮传动是用来传递运动和动力的,是微型机械不可缺少的组成部分。现在国内已研制出厚度B-301m,分度圆直径d-3501m,车由孔陡直度大于80°的微型渐开线齿轮。但所制造出来的微型齿轮存在着高宽比(指Bld)不足和强度不够的问题,处于“能看不能动,能动不能用”的状况。本研究所研制的微型齿轮,要求厚度B-3X10-4m-SX 10m,使其能真正地投入实际应用中,能够传递一定的力或力矩。理论分析的目的是,探讨在一定齿轮参数和载荷情况下,微型齿轮需要多大的厚度,才能正常工作。鉴于目前还未曾见到涉及微型齿轮强度的设计理论和方法,我们从微型齿轮在微型机械中的实际应用状况出发,在弹塑理论的基础上,运用有限元分析方法,对微型齿轮进行建模、网格划分、齿根弯曲强度计算、图像处理和分析,为微型齿轮的理论设计提供了一种可行的方法。
微型齿轮采用渐开线齿廓,在能够满足运动要求的前提下,微型齿轮的尺寸应尽可能小,这势必限定了它的模数要小、齿数要少。由于本课题中微型齿轮的齿数都大于产生根切的最小齿数17,故在这里不考虑根切问题。研究的大高宽比微型齿轮,由于其加工方法及其尺寸较小的特点,为了改善齿轮的啮合性能,对于相互啮合的大小齿轮均采用正变位。微型齿轮的啮合参数为z1-18,z2-34,m-0.03,8-3501m,x1-0.439235,x2-0.286873,h-1,cKc-0.35,a-20。
微型齿轮三维实体造型是借助于AutoCAD的二次开发语言Visual LISP,绘制出变位微型齿轮的二维图形,再转换为图形格式IGS文件,通过文件接口转换到三维软件Solid Edge环境下。设定微型齿轮的宽度B,利用其“拉伸填料特征”功能,即可生成研究所需要的微型齿轮三维模型。
本研究涉及的微型齿轮是采用激光快速成型加工而成的。采用激光快速成型方法,不需要特殊工具,适合于自动化连续操作,工件不受切削力的影响,容易保证加工精度,而且能加工各种材料,加工速度快,效率高,热影响区小,工件不必放在真空里加工,设备简单,价格低廉,所以激光快速成型法是目前加工微型构件的一种行之有效的方法。
专业从事机械产品设计│有限元分析│强度分析│结构优化│技术服务与解决方案
杭州纳泰科技咨询有限公司
本文出自杭州纳泰科技咨询有限公司www.nataid.com,转载请注明出处和相关链接!