 手机直线:
手机直线: 咨询热线:0571-56211150
咨询热线:0571-56211150








混凝土水力破拆机器人是用超高压水射流破拆受损混凝土,与传统机械式接触破拆相比,具有安全、高效、无污染、对钢筋无损害等优点,大大降低了工人劳动强度,在公路、隧道、桥梁、大坝、港口、矿山等混凝土维护工程中可广泛应用。美国、瑞典等国家水力破拆机器人研制较早,现在已广泛应用,目前国内还是传统的机械式破拆,但水力破拆是受损混凝土修复的发展趋势,而国外产品价格昂贵、维护不便,因而研发国产水力破拆机器人有重要工程意义。
机械臂是混凝土水力破拆机器人的执行机构,对结构的刚度、强度要求较高。运用ANSYS Workbench建立机械臂有限元分析模型,通过静力学和模态分析,指出结构设计中薄弱部位并加以优化,分析流程如图1所示。
按等效刚度原则,简化机械臂结构。将销轴、螺栓连接简化为面接触;忽略螺纹和无应力集中的圆角、倒角;删除次要的孔、台,等效分配其质量;忽略液压马达、液压缸及液压管路,等效其配重。机械臂各关节至最大位置,在自重、负载作用下,所受载荷最大,是机械臂的极限工况,如图2所示。
1)零部件材料
滚轮、连杆和销轴是45钢,其密度为7830kg/m3,泊松比为0.29,弹性模量206GPa,喷嘴是人造红宝石,密度为3500kg/m3,泊松比为0.07,弹性模量1100GPa,其余材料为Q235,密度为7850kg.m3,泊松比为0.3,弹性模量200GPa。
2)定义接触和网格划分
无相对移动的螺钉连接,用粘接接触,如连接法兰与伸缩臂、支架;有相对滑动但不分离的,用不分离接触,如伸缩臂与伸缩套、滚轮与支撑架间;有相对滑动的,用有摩擦接触,如滚轴与滚轮,摩擦系数为0.003。设置边界条件,采用自动划分网格,共197277个节点,117633个单元,如图2所示。
3)添加约束与施加载荷
机械臂所受载荷复杂,包括自重、输送管重、高压水重,射流反作用力外和风力载荷。其中,风力影响很小,输送管重、高压水重远小于射流反作用力,均可忽略不计,故机械臂受力F如式所示。
超高压水为连续射流,喷嘴内外压力、流速不同,忽略出口截面高度差,由伯努利方程,如式(2)所示,其中p1、p2为喷嘴内外压力,MPa;v1、v2为喷嘴内外平均流速,m/s;12ρ=12为喷嘴内外射流密度,kg/m3。
应用流体连续方程,如式(3)所示,喷嘴出口内外两点。假定喷嘴出口为圆柱形,则2A=πd/4,且12ρ,d为喷嘴截面直径,m;A1、A2为喷嘴内外截面面积,m2。
射流压力140MPa,流量为160L/min,射流反作用力F2=1406.5N,以均布力作用喷枪末端喷嘴;施加重力加速度,添加重力;采用固定约束立架底部四个安装孔。
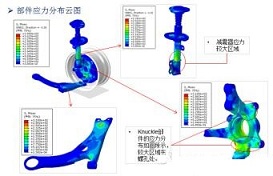
机械臂在射流反作用力和自身重力影响下,应力、应变如图3所示,滚轮与支撑架连接处有最大应力180.99MPa,滚轮材料为45钢,屈服极限为355MPa,一般材料最大许用应力是其屈服极限的0.5~0.8,可知滚轮处应力较大,应进行优化结构。在喷枪末端有最大位移8.801mm,接近工程中所允许最大值,需提高变形较大结构的刚度。
专业从事机械产品设计│有限元分析│CAE分析│结构优化│技术服务与解决方案
杭州那泰科技有限公司
本文出自杭州那泰科技有限公司www.nataid.com,转载请注明出处和相关链接!